The whole point of this project was to make a car stay on the road all by itself and defeat other players in a racing game called speed dreams.
Collection of training data
- Rapidly takes screenshots of the game and saves them in a folder
- The label in this case is the x-co-ordinate of the mouse which is captured by pyautogui and is stored in the formatted filename of each collected image. Image fileame formatting is done as
(x-value)_(unique_ID).png
Processing images
- Converts all images to numpy arrays with a depth of 3 for R,G and B color channels
- The shape gets changed from
[ width, height, depth ]to[ depth, width, height]for it to be of the right size for the CNN input channel - Pairs them with the corresponding mouse x-coordinate as array
[ [[[image]]] , [x-value] ] - all of the generated pairs are then stacked into one numpy array with the help of np.vstack() and saved
Data preprocessing and augmentation
- First things first, plotted the frequency distribution of each steering value hen
- Roughly doubled the amount of training data by generating mirror images of existing images and vstacking them with reversed steer value.
- Flattened the frequency distribution by making copies of random ramples of under-represented steering value data points
- Normalised the steering values by replacing the x-co-ordinates with steering values. In my case the “straight” steer value was at
x = 400, fornormalised_value = 400 - x_value
note : Right is negative steer value and left is positive
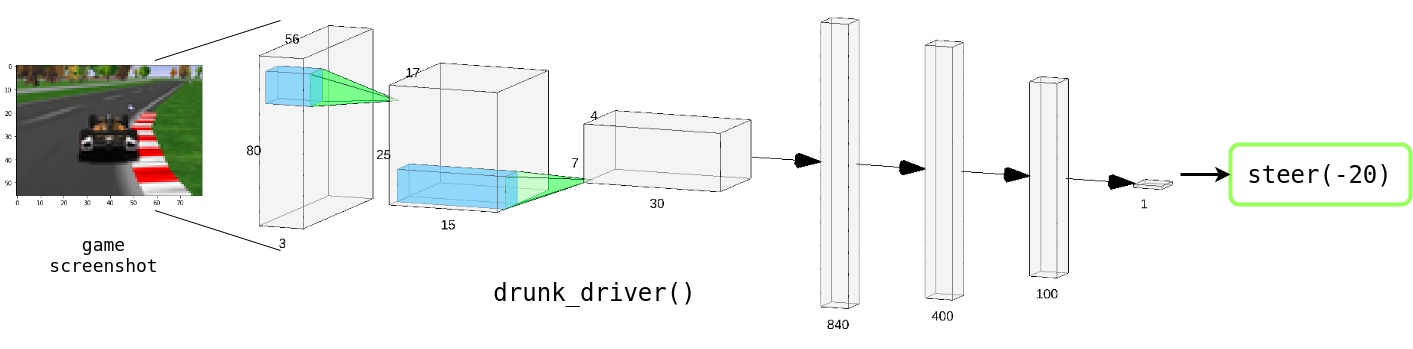
Self driving
- Rapidly taken screenshots are prerpocessed and fed to the trained CNN drunk_driver()
drunk_driver()returns a steer value- Returned value is taken care of by pyauogui which moves the mouse accordingly